Research Overview
I am interested in designing devices for image guided surgery. At a very high level, I think about the future of surgery and design and test the tools for the surgeons of the future.
My research includes ultrasound imaging and structured light imaging in surgery as well as augmented reality display of the ultrasound and structured light imaging.
Pico Lantern: Surface reconstruction and augmented reality in laparoscopic surgery using a pick-up laser projectornt
I have developed and submitted a provisional pattern for the Pico Lantern, a miniature projector for use in surgery. I built the Pico Lantern to address the challenges of: 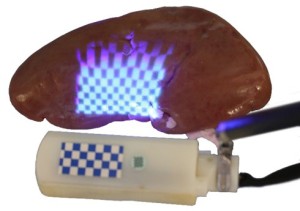 1) Using pre-operative images for intra-operative surgical guidance and 2) detect subsurface blood vessels. The Pico Lantern does this via accurate 3D surface reconstruction using structured light. The Pico Lantern is expected to decrease surgical complications and increase patient safety.
1) Using pre-operative images for intra-operative surgical guidance and 2) detect subsurface blood vessels. The Pico Lantern does this via accurate 3D surface reconstruction using structured light. The Pico Lantern is expected to decrease surgical complications and increase patient safety.
Click here to watch a video which shows the Pico Lantern in action.
For more information about this project, see my article, Pico Lantern: A Pick-up Projector for Augmented Reality in Laparoscopic Surgery, in the publications section of this website.
Augmented Reality Ultrasound Navigation System for Image Guided Surgery
I am developing an Augmented Reality Ultrasound Navigation System (ARUNS) which will make it easier for surgeons to use intra-operative ultrasound information to guide their surgery. Intra-operative ultrasound can tell the surgeon the location of subsurface blood vessels and tumors that they could not otherwise see. The main challenge is to provide the information to the surgeon in a way that does not obstruct their view of the surgical scene or distract them from the surgery.
Ultrasound Calibration for Augmented Reality in Surgery
 My goal is to make it easier and more useful for surgeons to use ultrasound during surgery. One way to do this is use computer graphics to do augmented reality ultrasound during surgery. In this project I proposed a novel approach to ultrasound calibration which is more accurate than the conventional approach. This is turn leads to more accurate augmented reality ultrasound.
My goal is to make it easier and more useful for surgeons to use ultrasound during surgery. One way to do this is use computer graphics to do augmented reality ultrasound during surgery. In this project I proposed a novel approach to ultrasound calibration which is more accurate than the conventional approach. This is turn leads to more accurate augmented reality ultrasound.
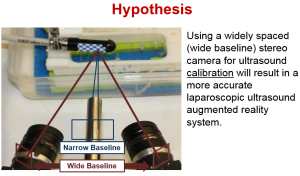
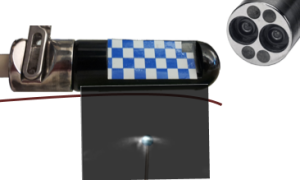
We propose stereo tracking of visible markers on a new “pickup” laparoscopic ultrasound transducer and a direct transformation of
the ultrasound image into the coordinates of a stereo laparoscope. We also suggest that ultrasound calibration be performed using a separate stereo camera system with a wide baseline. Such calibration is shown to improve point reconstruction accuracy from 3.1 mm to 1.3 mm.
For more information about this project, see my article, Calibration and Stereo Tracking of a Laparoscopic Ultrasound Transducer for Augmented Reality in Surgery, in the publications section of this website.
No comments.